Kinh Nghiệm Hiệu Chỉnh PID Cho Biến Tần Danfoss Dòng Automation Drives FC360
Có nhiều phương pháp tính toán thông số bộ điều khiển PID. Một trong đó là kỹ thuật Ziegler Nichols. Đây là phương pháp được phát triển từ thập niên 1950 nhưng vẫn còn hữu ích cho đến ngày nay.
CHÚ THÍCH
Phương pháp này không được sử dụng được với các ứng dụng có thể bị hỏng bởi các dao động được tạo ra bởi các thiết bị điều khiển có độ ổn định nhỏ.
Các tiêu chí để điều chỉnh các thông số có được dựa trên việc đánh giá đáp ứng hệ thống ở các giới hạn ổn định theo từng bước phản hồi . Tăng độ lợi tỷ lệ cho đến khi quan sát các dao động liên tục (tín hiệu phản hồi). Mức tăng tương ứng (Ku) được gọi là mức tăng tối đa. Chu kỳ dao động (Pu) (gọi là giai đoạn cuối cùng) được xác định như trong Hình 2.19.
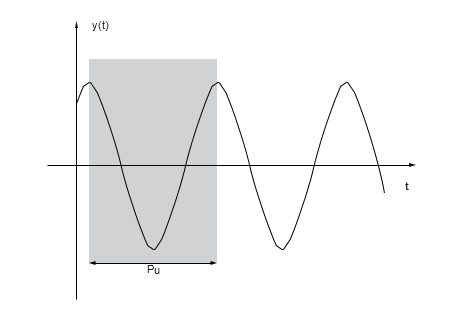
Pu nên được đo khi biên độ dao động là khá nhỏ. Sau đó, chúng ta tính toán các giá trị này một lần nữa, như thể hiện trong Bảng 2.9.
Ku là độ lợi mà tại đó dao động thu được.
| Type of Control | Proportional Gain | Integral Time | Differentiation Time |
| PI-control | 0.45 * Ku | 0.833 * Pu | – |
| PID tight control | 0.6 * Ku | 0.5 * Pu | 0.125 * Pu |
| PID some overshoot | 0.33 * Ku | 0.5 * Pu | 0.33 * Pu |
Bảng 2.9 Ziegler Nichols Tuning for Regulator
Kinh nghiệm cho thấy rằng thiết lập thông số PID theo quy tắc Ziegler Nichols cung cấp bộ điều khiển có tín hiệu phản hồi vòng kín tốt cho nhiều hệ thống. Người thiết lập có thể thực hiện điều chỉnh cuối cùng của điều khiển lặp đi lặp lại để mang lại khả năng kiểm soát thỏa đáng.
Từng bước Mô tả:
Bước 1: Chỉ chọn giá trị tỷ lệ, nghĩa là thời gian tích phân được chọn cho giá trị lớn nhất, trong khi thời gian phân biệt được chọn bằng 0.
Bước 2: Tăng giá trị của độ lợi tỷ lệ cho đến khi đạt được điểm bất ổn (dao động duy trì) và đạt được giá trị tới hạn, Ku.
Bước 3: Đo khoảng thời gian dao động để có được hằng số thời gian tới hạn, Pu.
Bước 4: Sử dụng bảng trên để tính các thông số điều khiển PID cần thiết.
Liên hệ với chúng tôi:
Công Ty Cổ Phần Kỹ Thuật Tự Động Song Nguyên
Trụ sở chính: 110/32/5 Tô Hiệu, P.Hiệp Tân, Q.Tân Phú, Tp.Hồ Chí Minh.
Chi nhánh: 47/17 Ao Đôi, Khu phố 10, P.Bình Trị Đông A, Q.Bình Tân, Tp.Hồ Chí Minh.
VPDD: số 180/2, đường DT848, ấp Khánh Hoà, xã Tân Khánh Đông, TP Sa Đéc, Đồng Tháp.
Hotline: 0903 907 698
Hỗ Trợ Kỹ Thuật: 0902 992 786
Fax: (028) 38 164 028
Email: info@songnguyen.vn
Website: http://songnguyen.vn
Youtube: Anh Sang – Song Nguyên

